
Previous chapter
Today’s MAIN QUEST

내가 캡쳐한 애니메이션을 다른 캐릭터에도 적용시키고 싶어!
내가 움직이는 데이터는 사람에 대한 데이터. 그런데 이 데이터를 곰에 대응시킬 수 있을까?
즉, 사람이 사람답게 움직인다면 곰이 사람처럼 움직일 것이고,
역으로 사람이 곰처럼 행동해서 곰 모캡이 가능할 것이다.
Constraint에 대해서도 생각해봐야 한다.
정관절로 움직이는 모델을 역관절로 이식하게 될 경우에는?
1.
두 개 이상의 관절이 병합되는 경우
2.
있던 관절이 사라지는 경우
3.
없던 관절이 생기는 경우
각각의 관절에 대해 맵을 만들어준다.
각 매핑된 관절에 대해 Constraint를 지정해준다.
또한 구성이 같은 경우에도 형태가 달라지게 될 경우에도 신경써야한다.
Constraint 비율 조절을 집중적으로 해야할 것.
Motivation for Motion Retargeting
•
콘텐츠 및 리소스 재사용
•
Conventional Animation Authoring
•
Bone 설택
•
Bones를 새로운
Animation Models
•
bodies : links와 동일
•
Meshes : 링크에 대응하는 메쉬
•
Texture : 피부에 대응하는 텍스쳐
•
Function :
STEP 1 : SELECTION
내가 움직이는 바디와 타겟 바디 간의 링크들을 선택해서 매핑하자.
만약 이름이 같다면 동일하게 찾을 수 있다.
H-Anim 표준은 서로 대응되기 때문에 쉽게 찾을 수 있다!
•
Mechanical Finding
•
Semantic Finding
Basics : Query
기계적, 의미적인 Finding모두 Query를 통해
•
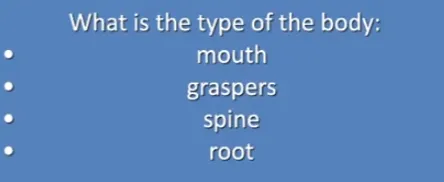
Function : 같은 기능을 가지는 것들 끼리 매핑하기
◦
Body의 타입을 지정한 후, 맞는 타입끼리 매핑한다.
•
Spatial Query : 위치 관계를 통해 매핑하기.
◦
몸통에서 왼쪽? 오른쪽?
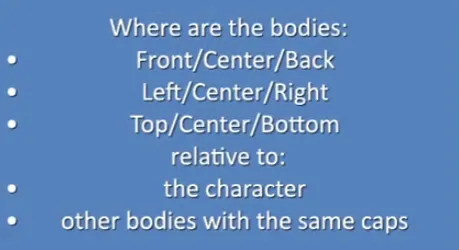
이런 매핑은 1대1 매핑이 일어나지 않을 수 있다!
•
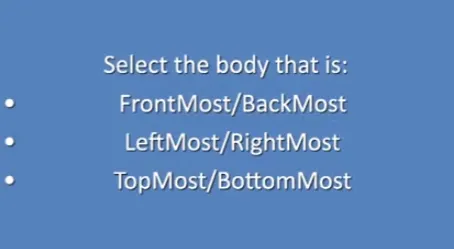
Extent Query : 거리 관계를 통해 매핑하기.
STEP 2 : POSING
매핑된 링크들에 대해서 포즈를 정해준다!
프로세스는
•
movement mode를 정의해서 해당 모드에서 어떻게 움직일지를 정의한다.
◦
사람이 걷는 경우에 대해서 룰 정의 → 개는 어떻게 걷는가?
매핑된 자유도만을 움직여주는것이 중요!!!
1.
액티브 바디가 움직여진다. : 일반적인 모션캡쳐는 여기까지!
2.
움직임을 일반해서 어떤 모드로 정의된다.
3.
일반화된 움직임이 저장된다.
4.
최종적으로 움직이고자 하는 바디에 대해서 Specialization이 이루어진다.
5.
움직이고자 하는 바디가 해당 규격에 따라 움직여진다.
Movement Mode
•
Identity
◦
Active와 Target 바디가 모두 동일하게 Transforming, Rotating하는 모드
•
Rest Relative
◦
Rest Pose를 기준으로 Transform, Rotate하는 모드. 두 포즈가 비슷하면 비슷한 결과가 나옴.
•
Scale Mode
◦
상대적인 움직임을 사이즈나 길이에 대비해서 조절하는 모드
•
Ground Relative
◦
기준점을 바닥에 고정시켜서 나머지 부분을
◦
비슷한 포즈의 경우 매우 좋은 결과를 냄.
•
Secondary Relative Movement
◦
벽이나 물체 등의 외부 환경을 기준으로 얼마만큼 떨어져있고 회전하는가를 측정
•
Lookat
◦
특정한 방향으로 바라보게 회전시키는 것
•
Mirroring Mode
◦
측정한 것과 거울처럼 반대로 움직이는 모드.
STEP 3 : BLENDING & KEYING
만들어진 여러 모션을 서로 연결하는 단계
걷다가 뛸 때, 뛰다가 멈출때 등등…
Next chapter